4 Výsledky
Zobrazit výsledky:
Seřadit podle:
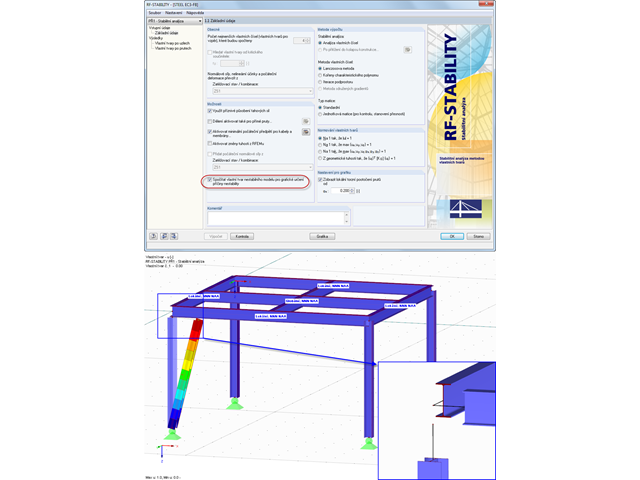
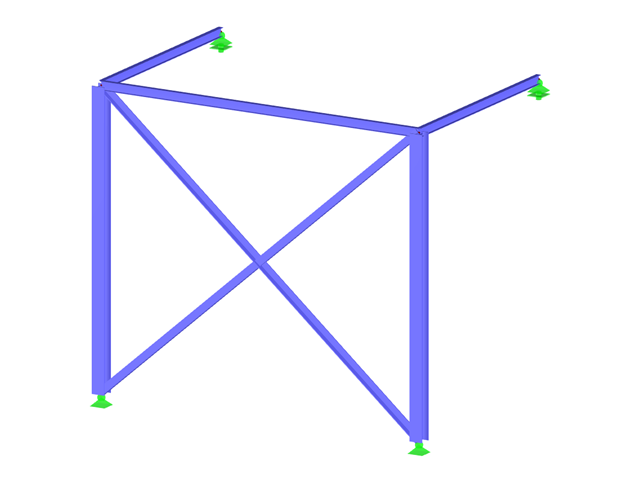
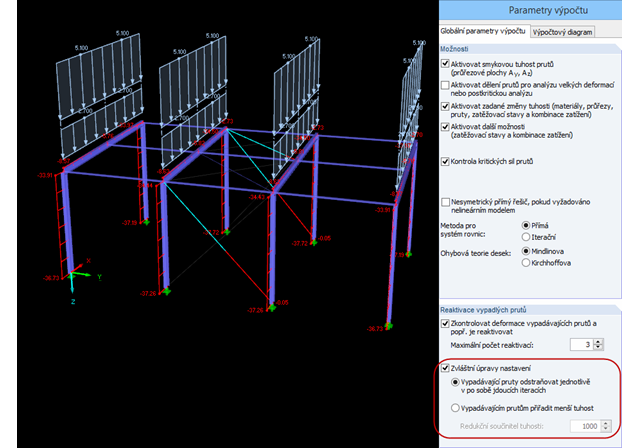
Nejčastější příčinou nestabilních modelů je nelinearita při neúčinnosti prutu jako jsou tahové pruty. Nejjednodušším příkladem je rám s kloubově podepřenými sloupy a momentovými klouby v hlavicích sloupů. Takový nestabilní systém musí být stabilizován křížovým ztužením tahovými pruty. V případě kombinací zatížení s vodorovným zatížení zůstává takový systém stabilní. Pokud je však konstrukce zatížena pouze svisle, oba tahové pruty ztužení jsou neúčinné a systém se stává nestabilním, což způsobí přerušení výpočtu. Tomu se lze vyhnout nastavením Zvláštních úprav vypadávajících prutů v menu „Výpočet“ → „Parametry výpočtu“ → „Globální parametry výpočtu“.
Přerušení výpočtu kvůli nestabilní konstrukci může mít různé příčiny. Na jedné straně to může ukazovat na "skutečnou" nestabilitu vlivem přetížení systému, ale na druhé straně mohou být za toto chybové hlášení odpovědné i nepřesnosti v modelování.
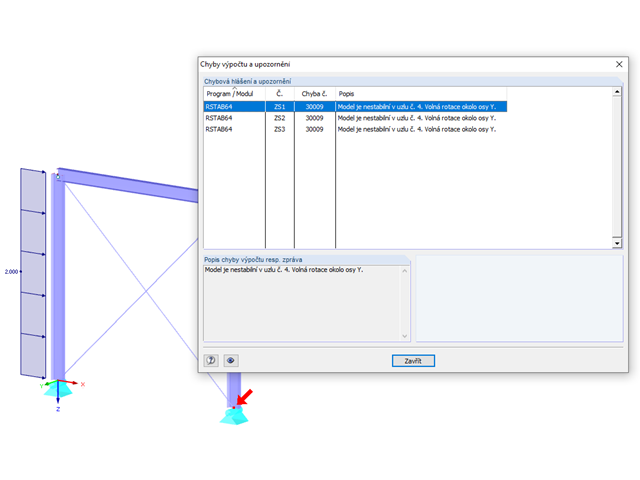
Pokud výpočet modelu prutu analýzou druhého řádu končí chybovým hlášením, bývají často příčinou této nestability vypadlé tahové pruty: Jestliže v některém výpočetním kroku působí v tahovém prutu tlakové síly, tento prut se v následujících iteracích nezohlední. Model se tak může stát nestabilním.
Diagonály ztužení jsou většinou typu „Tahový prut”. Zde je třeba neopomenout několik zvláštností, které často u pravidelných, symetrických konstrukcí a výhradně svislých zatížení vedou k chybovým hláškám typu: 'Model je nestabilní v uzlu 20. Volný pohyb ve směru Y."